En automatisme, la programmation orientée objet, souvent abrégée POO, consiste à représenter une fonction physique de la machine sous forme d’un objet logiciel structuré. Cette approche repose sur plusieurs principes fondamentaux de la programmation orientée objet, comme l’encapsulation (regrouper données et comportements), l’héritage (réutiliser et spécialiser des structures existantes) et le polymorphisme (adapter le comportement d’un objet selon son contexte).
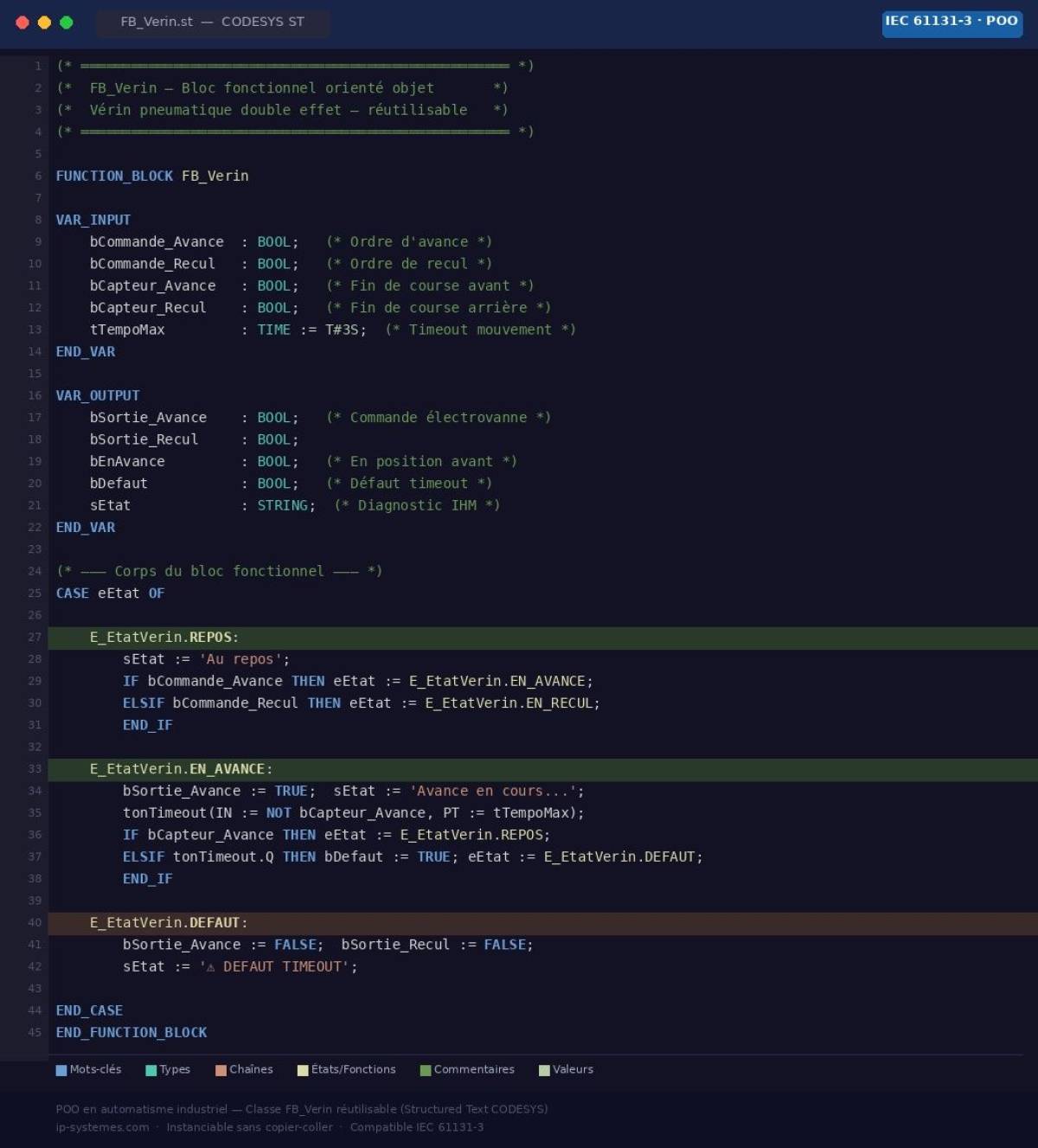
Prenons un exemple simple : un vérin pneumatique.
Dans une approche classique, sa logique peut être répartie dans plusieurs zones du programme : commande, retours capteurs, temporisations, défauts, conditions de cycle, messages d’alarme, affichage IHM… Cela fonctionne, bien sûr. Mais lorsque la machine évolue ou que le même vérin existe en plusieurs exemplaires, le programme peut devenir plus difficile à lire, à dupliquer et à maintenir.
Avec une approche orientée objet, on regroupe la logique du vérin dans une structure cohérente. L’objet peut intégrer :
- Ses commandes ;
- Ses états ;
- Ses retours capteurs ;
- Ses défauts ;
- Ses temporisations ;
- Ses méthodes de pilotage ;
- Ses informations utiles au diagnostic.
L’idée est simple : un équipement ou une fonction machine devient un composant logiciel identifiable, documenté et réutilisable.
Ce même principe peut s’appliquer à un convoyeur, une pompe, un axe motorisé, une pince, une vanne, un module de pesage, une station de contrôle ou encore un sous-ensemble complet d’une machine.



Comment démarrer avec la POO en automatisme industriel ?
Le plus pertinent est de commencer progressivement : identifier les fonctions récurrentes, définir une structure standard, créer quelques objets simples, les tester sur un projet pilote, puis construire une bibliothèque interne documentée et maintenue.